为了能在计算机上显示导航方向盘的界面,我们在服务程序库(Services)中选择导向对话框(Direction Dialog)并拖放到主编程区域中。然后,从基础活动栏(Basic Activities)中依次将计算机(Calculate)模块、条件选择模块(Switch)、数据模块(Data)按顺序添加到编程区域中,如图所示。
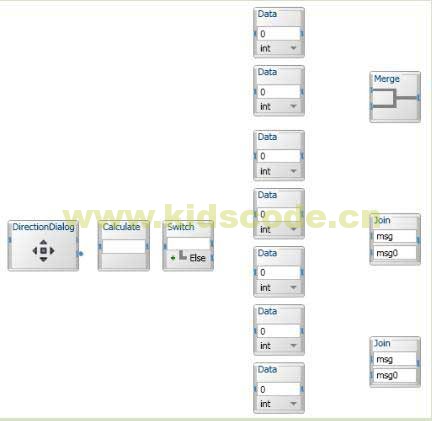
连接各个模块并设置参数
完成了上述图标的选择后,我们就需要将这些图标用连线的方式将它们串联成一组程序,并在各个模块中设定相应的参数完成编程,其用法与Robolab类似,最后在服务程序栏(Services)中选择电机控制模块(Generic Differential Drive)去驱动乐高NXT机器人在左右两个电机马达,见下图所示。

当我们在计算机里的导航方向盘中按下某一个方向键后,所选按钮的名称就会从Direction Dialog中输出,经过Switch分支判断所得到的消息是什么按键命令,然后输出到相应分支的数据设定模块中,给定电机的马达功率。最后控制电机马达以所设的功率运行,注意,在微软机器人工程开发平台中,对于马达功率的控制范围用-1到1内的数值表示。
选择机器人并执行程序
完成了前两步的设定,我们导航机器人的程序编写也就告成了。接着就要做一项非常重要的工作,即机器人的选择,我们在前面的介绍这种已经知道微软机器人工程开发平台作为一款通用的软件,可以用于各种不同的机器人,因上,我们就要在一些输入或输出的模块中进行选择设定,告诉程序所要使用的机器人,在此。我们使用的是乐高NXT机器人,右击程序中的Generic Differential Drive图标,选择Set Configuration并在弹出的页面中单击Import Manifest 按钮,出现下图的选择界面。

在这个界面中,可供我们选择的机器人种类有许多,我们可以选择LEGO.NXT.TriBot.manifest.xml用于控制手边的NXT机器人,也可以选择LEGO.NXT.Tribot.Simulation.manifest.xml在微软机器人工程平台中的3D仿真器中运行乐高NXT机器人,最后,按F5或工具栏菜单中的Start命令启动程序实现我们所编写的程序。
在微软机器人工程平台中,要控制乐高NXT机器人只有通过蓝牙的方式进行程序传输和联机,当启动我们的程序后,系统会自动下载一个名为MSRS2006的程序到NXT的控制器中并自动运行,作为一个监控程序,它会自动采集机器人上传感器的信息和执行PC主机对于NXT的控制命令。当完成蓝牙连接并成功在计算机上运行所编写的程序后,我们会在IE浏览器中看到一个NXT机器人的控制网页和我们所期望看到的导航方向盘。



此外,如果你选择的是乐高NXT机器人的模拟器后,会在计算机中出现如图的仿真界面,按导航方向盘中的按键也同样能够操控其中的乐高NXT机器人运行,如图。

除了以上所提到的功能之外,微软机器人工程平台还有许多有趣的模块可以供用户自由开发,例如可以增加游戏手柄来代替导航方向盘,使用MSN来远程控制你的乐高机器人等,有待大家进一步的探索和开发。
本站内容未经许可,禁止任何网站及个人进行转载。








)window.location='http://scratch.chinayantai.net/article/detail/id/dla_12.jpg'){kind=link}
)window.location='http://scratch.chinayantai.net/article/detail/id/dla_09.jpg'){kind=link}